26646 Stallion Robotics
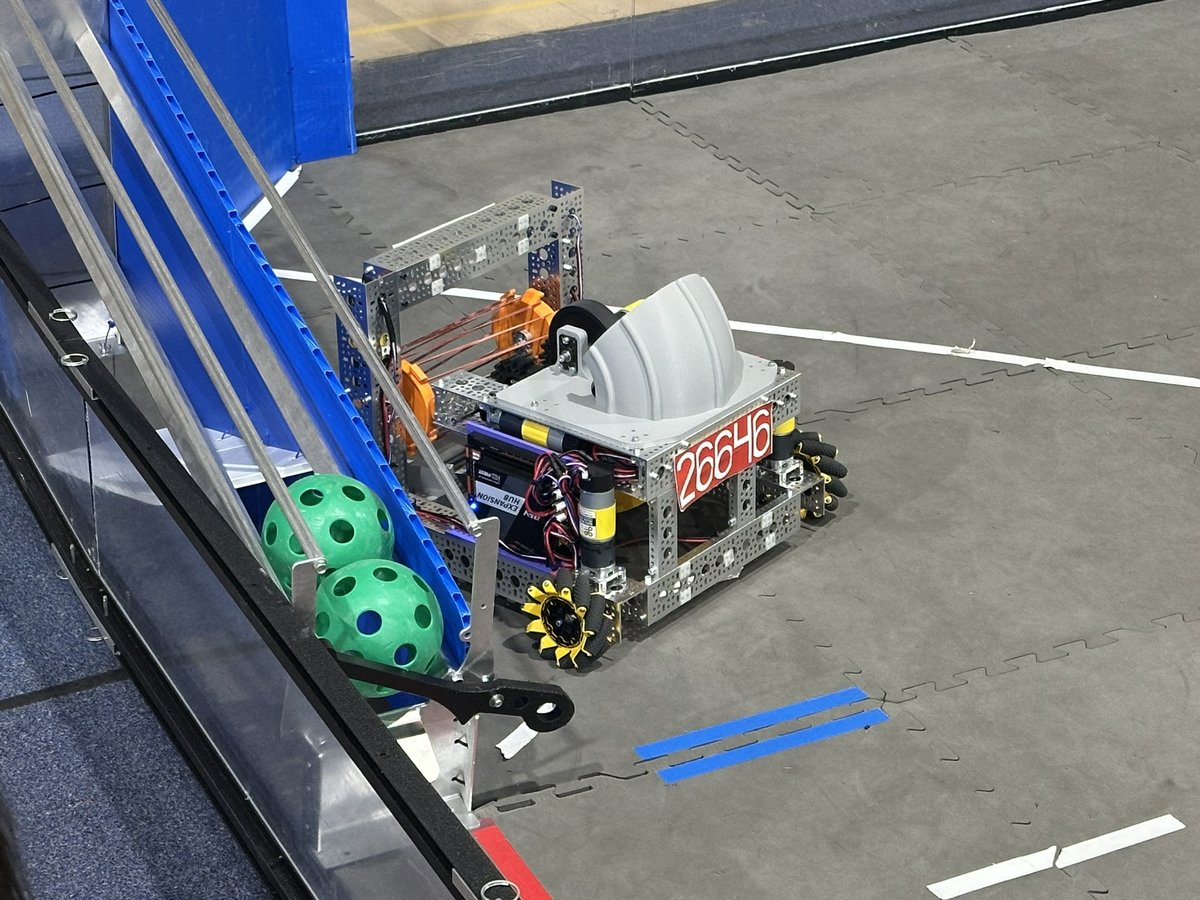
Robot Details
| Drive type | Mecanum |
| Intake | Front scoop/bucket with curved white element |
| Scoring | Appears to have a transfer mechanism to lift samples |
Adventist Robotics League Championship (April 12, 2026)
Summary
| Stat | Value |
|---|---|
| Matches scouted | 3 |
| Auto (near start) | 1/4 shots (~3 pts), no leave (1 match) |
| Auto (far start) | 1/2 shots (~1.5 pts avg), leave (2 matches) |
| Teleop accuracy | 9/15 (60%), ~9 pts avg |
| Leave points | 2 of 3 matches |
| Base | Partial / Full |
| Cycle speed | Slow / not recorded |
| Played defense | No |
| Driver skill | Good / Needs work |
Scouting Notes
- Pit robot photo shows a compact mecanum-drive chassis with a front-mounted curved white scoop/bucket intake
- REV Expansion Hub visible; REV-based build with channel construction
- Robot was photographed on the competition field during practice
- Near-start autonomous was limited to 1/4 shots in one observed match, while both far-start sheets scored leave points and one added a made auto shot.
- Latest LW sheet showed 3/6 teleop scoring from the near zone with a full base and another successful leave.
- One form was labeled Match 10, but the official schedule does not show 26646 in Q10, so that result is unconfirmed.
- Teleop scoring was light in Match 6, and the scout noted the robot attempted to drive around defense.
- No defense was played on the recorded sheets, and the robot did not break down.
Match Details
Match reported as 10 — Red Alliance
Scout: LW
Autonomous: Started far. Moved and scored leave points. Shots: ✓✗ (1/2, ~3 pts)
Teleop: Shots: ✓✓✓✗✗✗ (3/6, ~9 pts). Shot from the near zone. Cycle: Slow. No defense played. Base: Full.
Overall: Driver skill rated Needs work. Intake was marked Yes. Did not break down.
Notes: The form was labeled Match 10, but the official schedule does not show 26646 in that qualification match, so the exact result is unclear.
Match 6 — Blue Alliance (Lost 70-129)
Scout: LW
Autonomous: Started far. Moved and scored leave points. No auto shots were recorded. (~0 pts)
Teleop: Shots: ✓✗ (1/2, ~3 pts). Shot location was not circled on the form. Cycle: Slow. No defense played. Base: Full.
Overall: Driver skill rated Needs work. Intake was marked Yes. Did not break down. Alliance partner preference: No.
Notes: Response to defense was “Attempted to drive around.”
Match not recorded — Alliance not recorded
Scout: not recorded
Autonomous: Started near. Moved but did not score leave points. Shots: ✗✓✗✗ (1/4, ~3 pts)
Teleop: Shots: ✓✓✓✗✓✓✗ (5/7, ~15 pts). Shot from the near zone. Cycle speed was not recorded. No defense played. Base: Partial.
Overall: Driver skill rated Good. Did not break down. Alliance partner preference was not recorded.